Save as PDF
Opens your browser print dialog — select "Save as PDF" to download.
[2]
Total No. of Questions : 8
[Total No. of Printed Pages : 6]
Roll No
EE/EX-405
B.Tech./B.Tech. (Working Professional) IV Semester
Examination, June 2025
Grading System (GS) / Working Professional
Control System
Time : Three Hours
Maximum Marks : 70
Note:
i) Answer any five questions.
किन्हीं पाँच प्रश्नों को हल कीजिए।
ii) All questions carry equal marks.
सभी प्रश्नों के समान अंक हैं।
iii) Sketch neat diagram.
स्वच्छ ���ित्र बनाइए।
iv) In case of any doubt or dispute the English version question should be treated as final.
किसी भी प्रकार के संदेह अथवा विवाद की स्थिति में अंग्रेजी भाषा के प्रश्न को अंतिम माना जायेगा।
1.
a)
For a given rotational system, obtain the electrical analogous systems based on inverse and direct analogous methods.
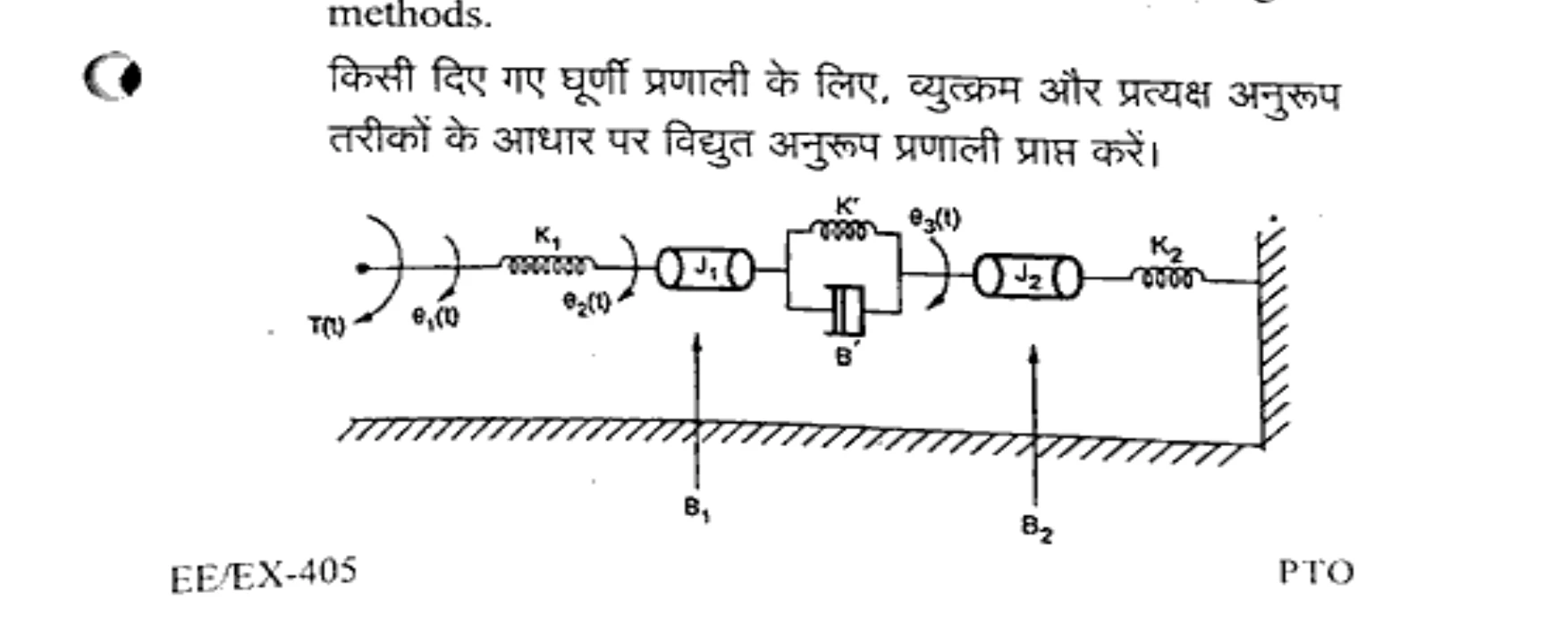
किसी दिए गए घूर्णी प्रणाली के लिए, व्युत्क्रम और प्रत��यक्ष अनुरूप तरीकों के आधार पर विद्युत अनुरूप प्रणाली प्राप्त करें।
2.
b)
Using Mason's gain formula, find the gain of the following system in figure below.
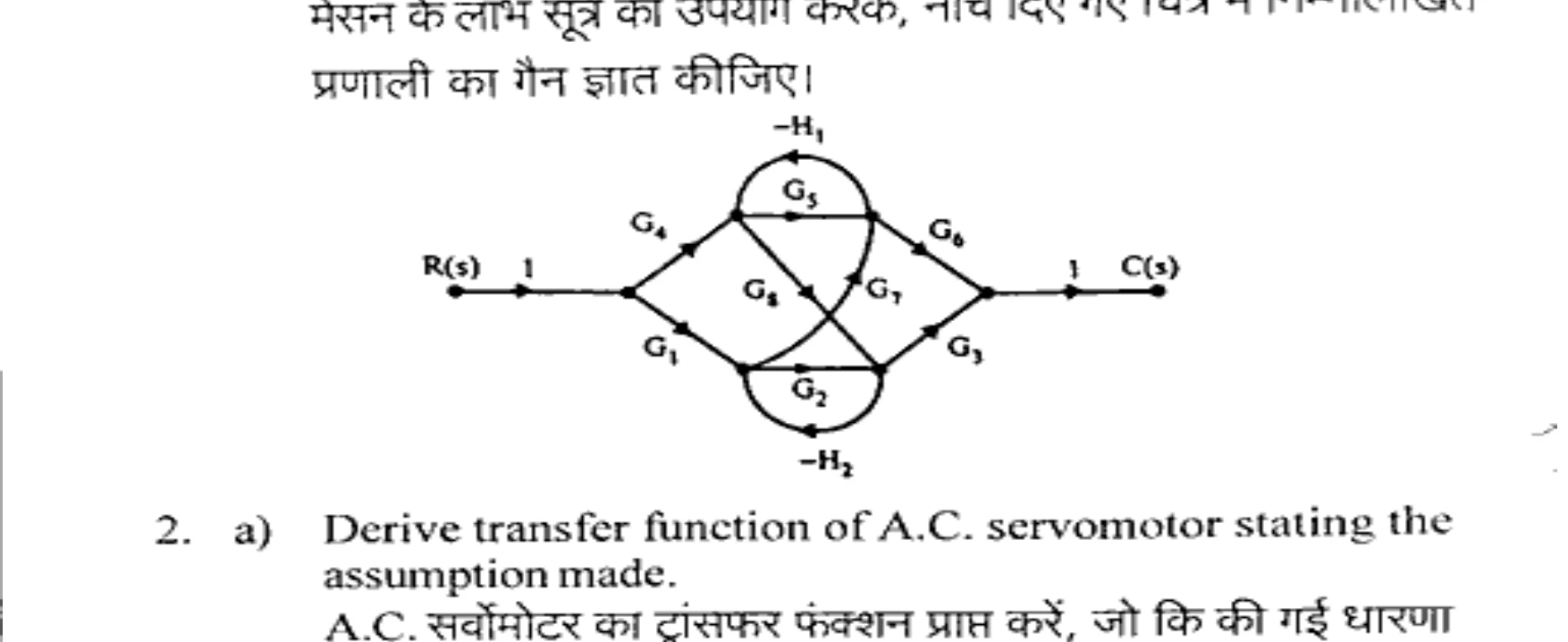
मेसन के लाभ सूत्र का उपयोग करके, नीचे दिए गए चित्र में निम्नलिखित प्रणाली का गेन ज्ञात कीजिए।
a)
Derive the transfer function of A.C. servomotor stating the assumption made.
A.C. सर्वोमीटर का ट्रांसफर फंक्शन प्राप्त करें, जो कि की गई धारणा को बताता है।
b)
Derive the relationship maximum overshoot and damping ratio of a second order system. Draw the graph or overshoot versus damping ratio.
सेकंड ऑर्डर प्रणाली के अधिकतम ओवरशूट और अवमंदन अनुपात के बीच संबंध प्राप्त करें। अवमंदन अनुपात बनाम ओवरशूट के बीच ग्राफ बनाइए।
3.
a)
The Fig. shows PD controller used for the system. Determine the value of Td so that system will be critically damped. Calculate its settling time.
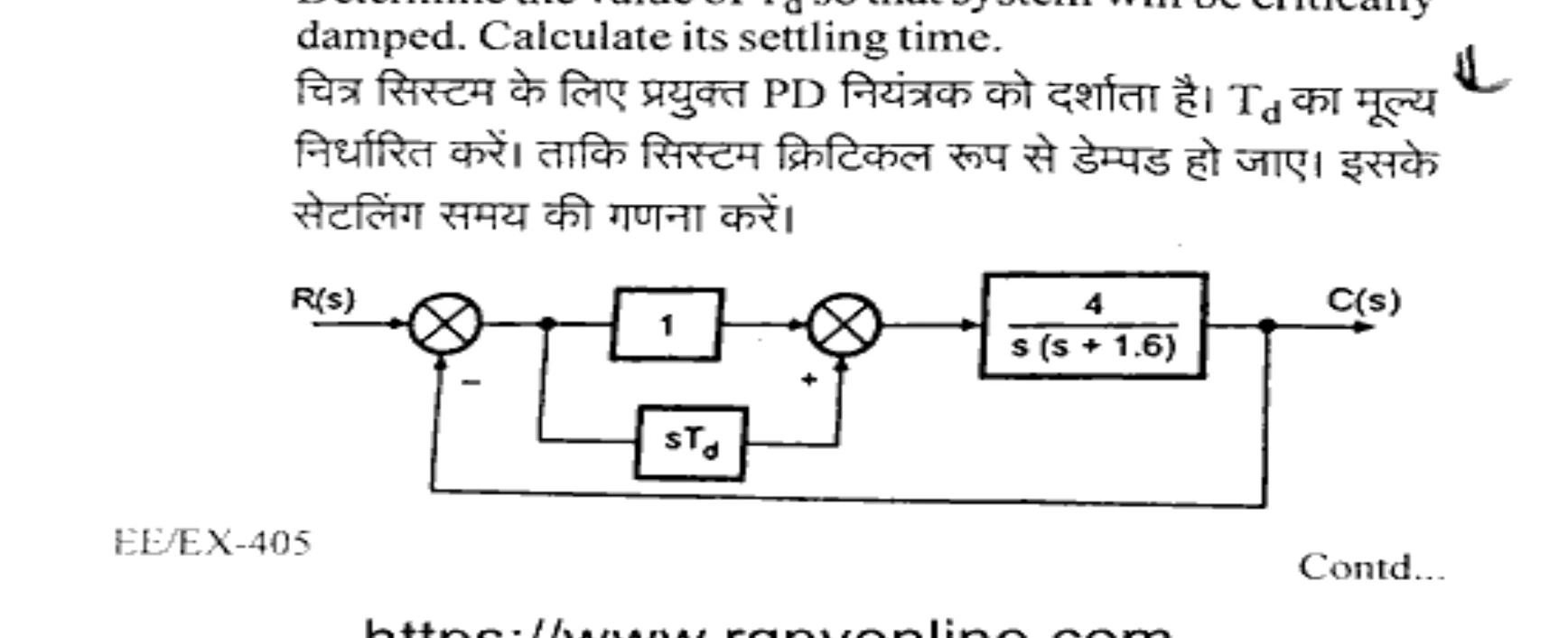
चित्र सिस्टम के लिए प्रयुक्त PD नियंत्रक को दर्शाता है। Td का मूल���य निर्धारित करें ताकि सिस्टम क्रिटिकल रूप से डैम्प्ड हो जाए। इसके सेटेल्लिंग समय की गणना करें।
[4]
4.
b)
Derive the expressions for static error coefficients? How these coefficients are useful in determining steady state error? State the limitations of static error coefficient method.
स्थैतिक त्रुटि गुणांक के लिए व्यंजक प्राप्त करें। ये गुणांक स्थिर अवस्था त्रुटि निर्धारित करने में कैसे उपयोगी हैं? स्थैतिक त्रुटि गुणांक विधि की सीमाएँ बताइए।
a)
For a unity feedback system,
G(s) = K(s(1+0.4s)(1+0.25s))
find range of values of K, marginal value of K and frequency of sustained oscillations.
G(s) = K(s(1+0.4s)(1+0.25s)) के मानों की सीमा, K का मार्जिनल मान और निरंतर दोलनों की आवृत्ति ज्ञात कीजिए।
b)
Sketch the complete root locus with approximate indication of breakaway points. Comment on the stability.
ब्रेकवे बिंदुओं के अनुमानित संकेत के साथ संपूर्ण रूट लोकस का रेखाचित्र बनाइए। स्टेबिलिटी पर टिप्पणी करें।
5.
a)
Explain the procedure of obtaining the value of K for specified damping ratio ξ from the root locus.
रूट लोकस से निर्दिष्ट अवमंदन अनुपात ξ के लिए K का मान प्राप्त करने की प्रक्रिया समझाइए।
b)
A unity feedback control system has
G(s) = 80s(s+2)(s+20)
Drawn the Bode Plot. Determine G.M., P.M., ωgc and ωpc. Comment on the stability.
एक यूनिटी फीडबैक नियंत्रण प्रणाली है G(s) = 80s(s+2)(s+20). बोड प्लॉट तैयार करें। फ़ाइण्ड G.M., P.M., ωgc एवं ωpc स्टेबिलिटी पर टिप्पणी करें।
6.
a)
For a feedback control system
G(s)H(s) = 40s(s+4)(s2+2s+2)
Find gain margin and stability from Nyquist plot.
फ़ीडबैक नियंत्रण प्रणाली के लिए G(s)H(s) = 40s(s+4)(s2+2s+2). फ़ाइण्ड गेन मार्जिन और नाइक्विस्ट प्लॉट स्टेबिलिटी ज्ञात करें।
[5]
7.
b)
What is Polar plot? Explain polar plots for Type 0, 1 and 2 systems.
पोलर प्लॉट क्या है? टाइप 0, 1 और 2 प्रणालियों के लिए पोलर प्लॉट की व्याख्या करें।
a)
A unit step input is applied to a unity feedback control system whose open loop transfer function is given by.
G(s) = Ks(s+T)
Determine the values of K and T given that maximum overshoot as 26% and resonant frequency ωr = 8 rad/s. Calculate the resonance peak Mr.
एक यूनिट स्टेप इनपुट को यूनिटी फीडबैक कंट्रोल सिस्टम पर लागू किया जाता है जिसका ओपन लूप ट्रांसफर फंक्शन द्वारा दिया जाता है। अधिकतम ओवरशूट 26% और रेजोनेंट आवृत्ति ωr = 8 rad/s को देखते हुए K और T के मान निर्धारित करें। अनुनाद शिखर Mr, की गणना करें।
b)
Define a different steps of Lag-lead compensation network.
लैग-लीड काम्पेन्सेशन नेटवर्क के विभिन्न चरणों को परिभाषित करें।