Save as PDF
Opens your browser print dialog — select "Save as PDF" to download.
EE/EX-405 (GS)
B.Tech. IV Semester
Examination, June 2024
Grading System (GS)
Control System
Note:
Answer any five questions.
किन्हीं पाँच प्रश्नों को हल कीजिए।
All questions carry equal marks.
सभी प्रश्नों के समान अंक हैं।
In case of any doubt or dispute the English version question should be treated as final.
किसी भी प्रकार के संदेह अथवा विवाद की स्थिति में अंग्रेजी भाषा के प्रश्न को अंतिम माना जायेगा।
Obtain the expression for y(t) which is satisfying the differential equations
y(t) के लिए व्यंजक प्राप्त करें जो अवकल समीकरणों को संतुष्ट करता है
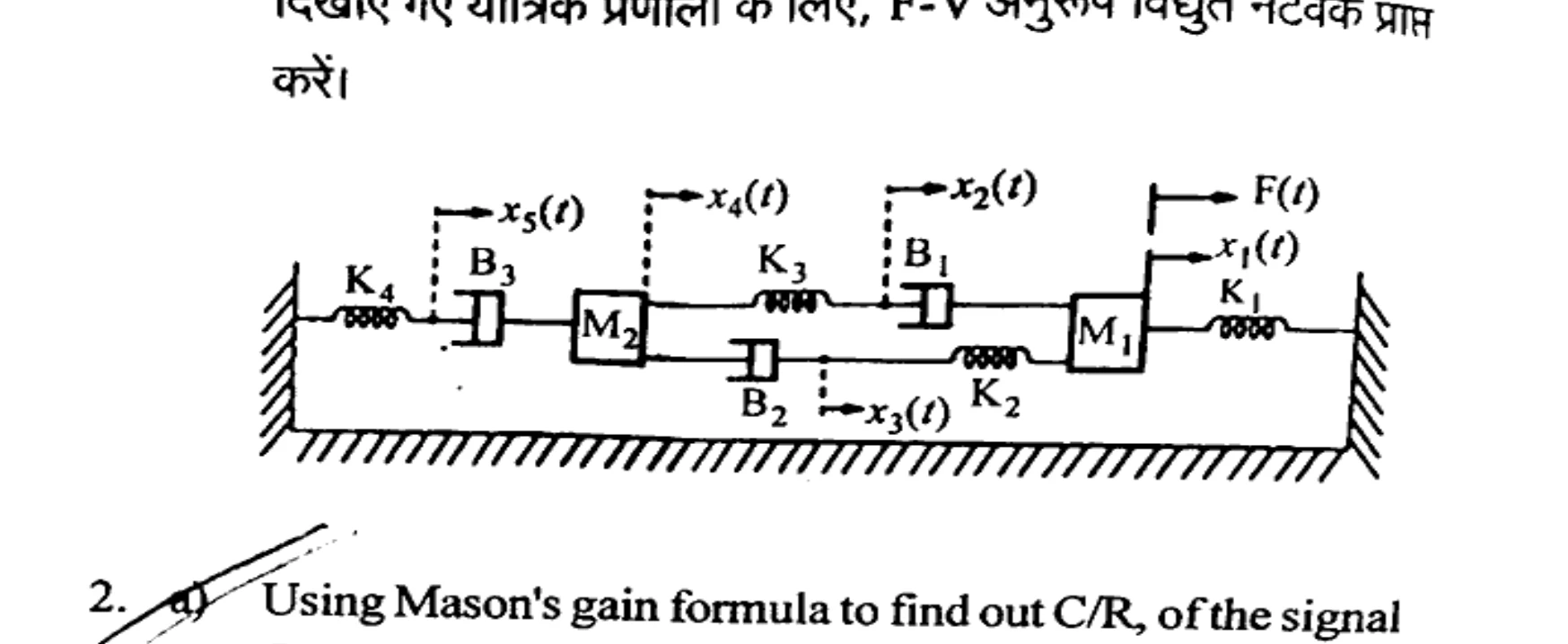
For the mechanical system shown, obtain the F-V analogous electrical network.
दिखाए गए सिम्मल प्रणाली के लिए, F-V अनुरूप विद्युत नेटवर्क प्राप्त करें।
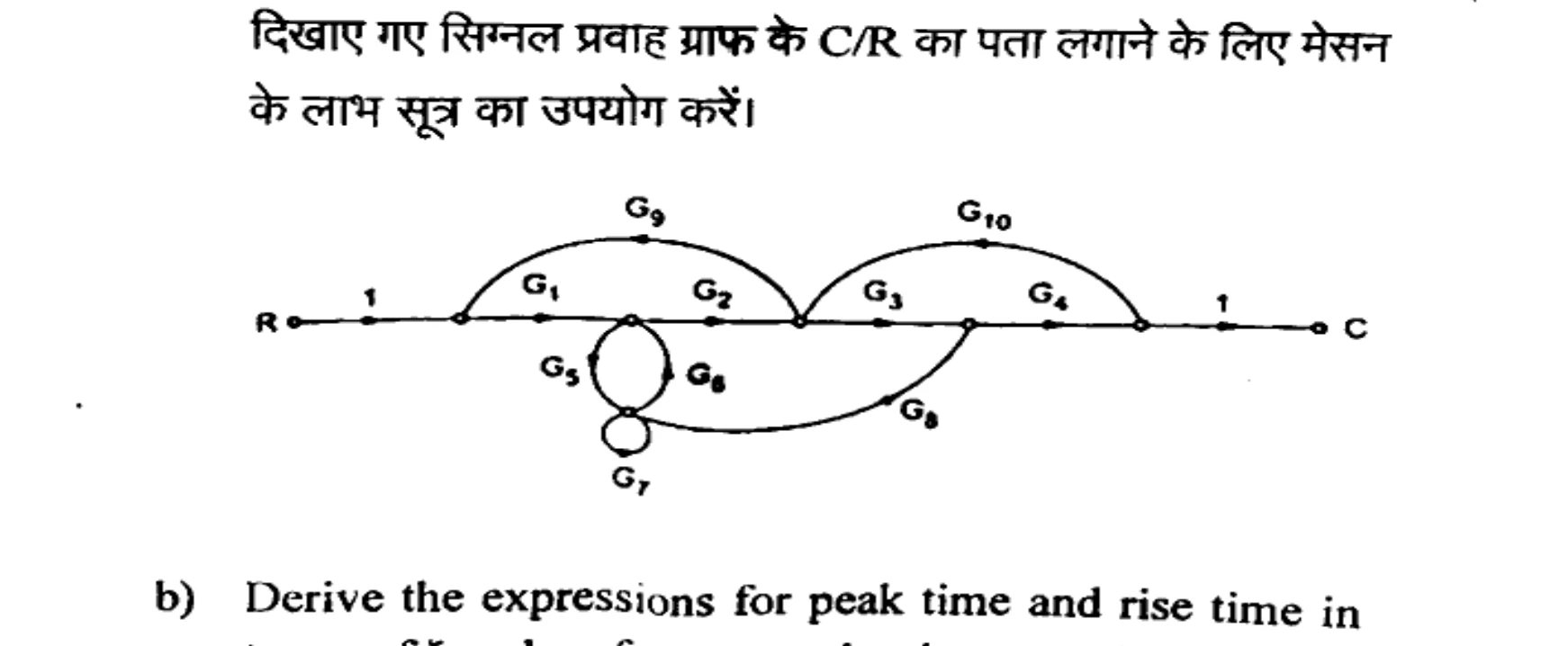
Using Mason's gain formula to find out C/R of the signal flow graph shown.
दिखाए गए सिग्नल प्रवाह ग्राफ के C/R का पता लगाने के लिए मेसन के लाभ सूत्र का उपयोग करें।
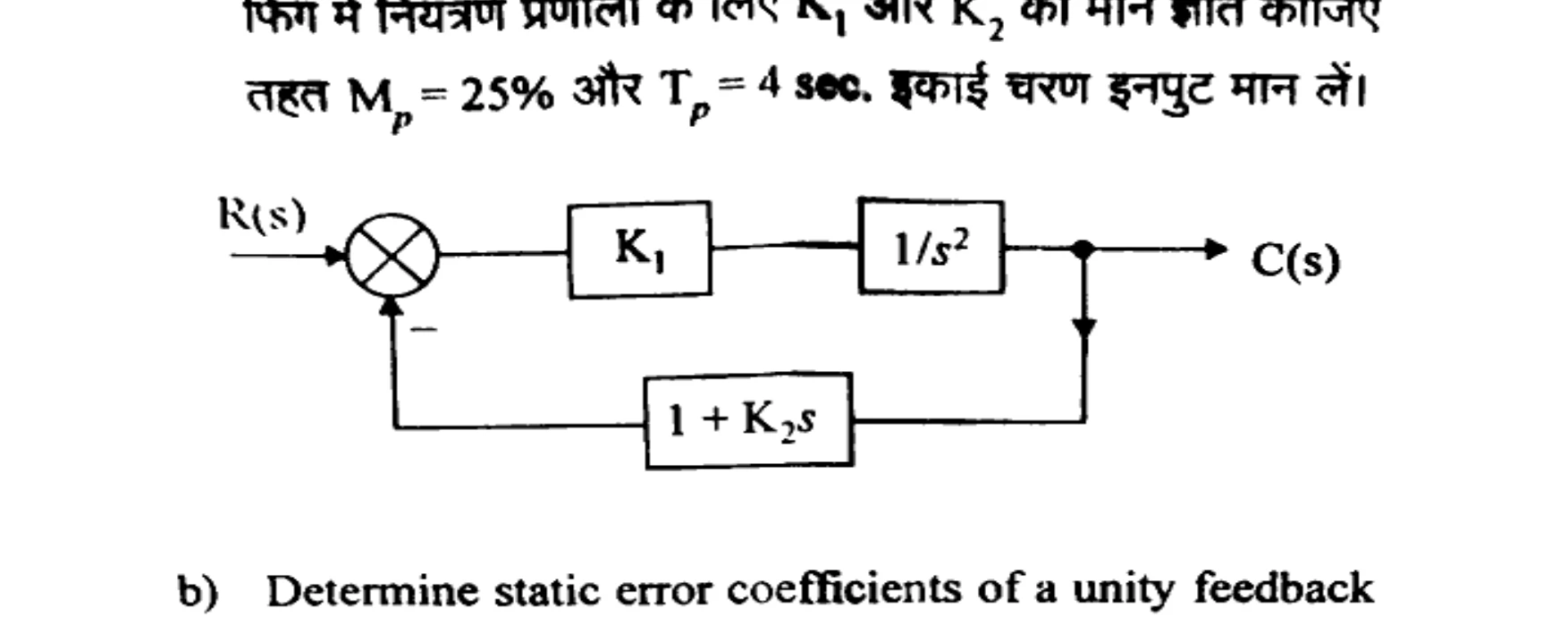
For a control system in fig., find the values of K₁ and K₂ that Mp = 25% and Tp = 4 sec. Assume unit step input.
चित्र में नियंत्रण प्रणाली के लिए K₁ और K₂ का मान ज्ञात कीजिए तहत Mp = 25% और Tp = 4 sec. इकाई चरण इनपुट मान लें।
Derive the expressions for peak time and rise time in terms of ξ and ωn for a second order control system.
दूसरे क्रम की नियंत्रण प्रणाली के लिए पीक टाइम और उदय समय के लिए ξ और ωn अभिव्यक्तियों प्राप्त करें।
Determine static error coefficients of a unity feedback system with G(s) =
एकता प्रतिप्रक्रिया प्रणाली के स्थैतिक त्रुटि गुणांक निर्धारित करें, G(s) =
`s^6 + 4s^5 + 3s^4 - 16s^3 - 64s - 48 = 0`. Find the number of roots of this equation with positive real part, zero real part and negative real part.
`s^6 + 4s^5 + 3s^4 - 16s^3 - 64s - 48 = 0`. धनात्मक वास्तविक भाग, शून्य वास्तविक भाग और ऋणात्मक वास्तविक भाग वाले इस समीकरण के मूलों की संख्या ज्ञात कीजिए।
The open loop transfer function of a control system is given by G(s) =
एक नियंत्रण प्रणाली का ओपन लूप ट्रांसफर फंक��शन किस के द्वारा दिया जाता है? G(s) =
What are the effects adding open loop poles and zero on the nature of the root locus and on system?
ओपन लूप पोल्स और शून्य जोड़ने से रूट लोकस की प्रकृति और सिस्टम पर क्या प्रभाव पड़ते हैं?
For a particular unity feedback system G(s) =
G(s) =
Find ωgc and ωpc, G.M., P.M. Comment on stability.
विशेष एकता फीडबैक प्रणाली के लिए G(s) =
Explain the concept of gain margin and phase margin. Explain how these values help in studying relative stability.
गैन मार्जिन और फेज मार्जिन की अवधारणा को समझाइए। बताइए कि ये मूल्य सापेक्ष स्थिरता का अध्ययन करने में कैसे मदद करता है।
For a certain control system G(s)H(s) =
एक निश्चित नियंत्रण प्रणाली के लिए G(s)H(s) =
Find the eigen values, eigen matrix and model matrix for,
इसके लिए आइगेन मान, आइगेन मैट्रिक्स और मॉडल मैट्रिक्स खोजे, A =
Write down properties of state transition matrix.
स्टेट ट्रांजीशन मैट्रिक्स के गुण लिखिए।
Write a short notes on (any two)
किन्हीं दो पर संक्षिप्त टिप्पणी लिखिए।
i) Techo-Generators
i) टेको-जनरेटर
ii) Polar plot
ii) पोलर प्लॉट
iii) AC servomotors
iii) AC सर्वोमोटर्स
iv) Proportional, derivative and integral control
iv) प्रपोर्शनल, डेरिवेटिव और इंटीग्रल नियंत्रण