Save as PDF
Opens your browser print dialog — select "Save as PDF" to download.
EC-404
B.Tech./B.Tech. (Working Professional) IV Semester
Examination, June 2025
Grading System (GS)/Working Professional
Control System
Note: i) Attempt any five questions.
किसी पाँच प्रश्नों को हल कीजिए।
ii) All questions carry equal marks.
सभी प्रश्नों के समान अंक हैं।
iii) In case of any doubt or dispute the English version question should be treated as final.
किसी भी प्रकार के संदेह अथवा विवाद की स्थिति में अंग्रेजी भाषा के प्रश्न को अंतिम माना जायेगा।
ब्लॉक आरेख प्रतिनिधित्व के संदर्भ में निम्नलिखित शब्दों की व्याख्या करें।
- ब्लॉक आरेख
- आउटपुट
- सारांश बिंदु
- टेक-ऑफ प्वाइंट
- आगे का पथ
- फीडबैक पथ
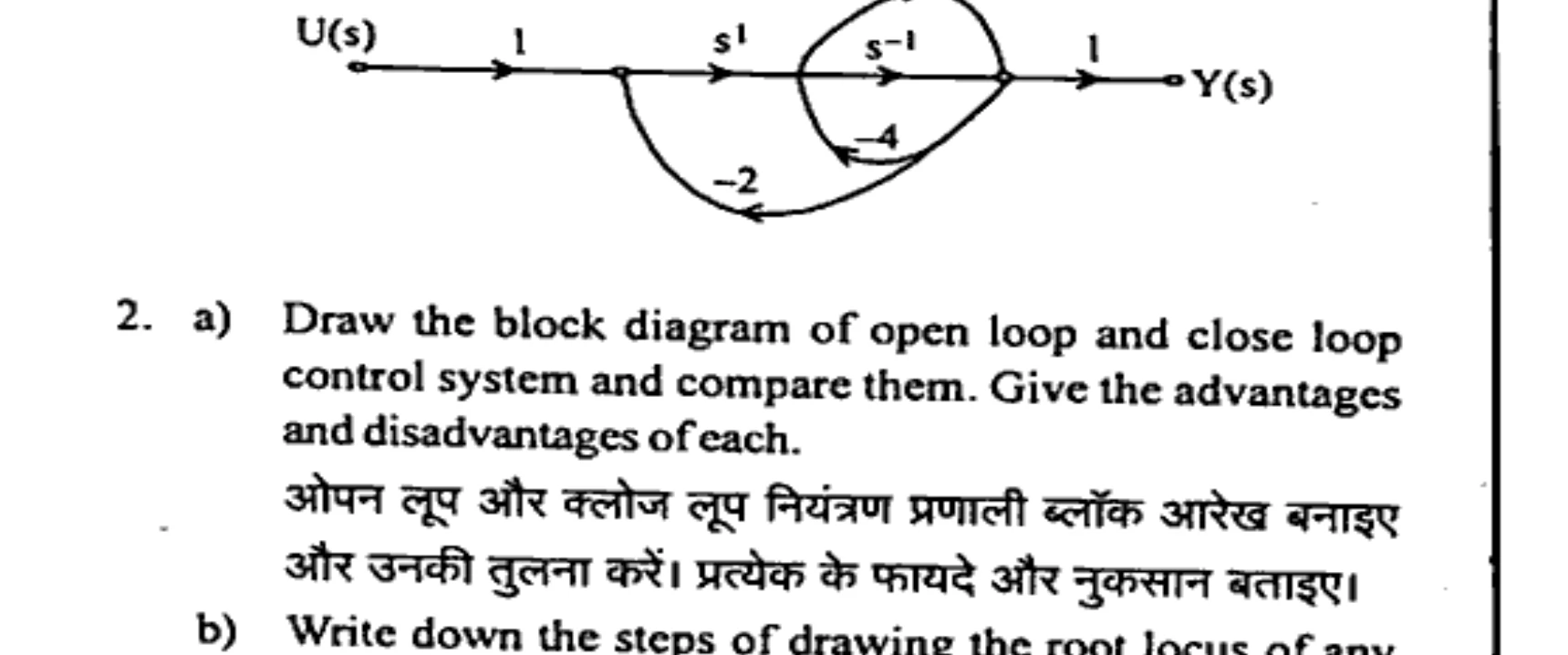
The signal flow graph for a system is given below. Find the transfer function Y(s)/U(s)
किसी सिस्टम के लिए सिग्नल प्रवाह ग्राफ नीचे दिया गया है। स्थानांतरण फंक्शन Y(s)/U(s) खोजे।
ओपन लूप और क्लोज लूप नियंत्रण प्रणाली ब्लॉक आर��ख बनाएए और उनकी तुलना करें। प्रत्येक के फायदे और नुकसान बताइए।
किसी भी सिस्टम के मूल स्थान को चित्रित करने के चरणों को लिखें। मूल स्थान से स्थिरता का आकलन कैसे किया जा सकता है।
G(s) = 40s(0.2s+1)
यूनिटी फीडबैक का ओपन लूप ट्रांसफर फंक्शन निम्नलिखित द्वारा दिया गया है
G(s) = 40s(0.2s+1)
इनपुट r(t) = (3 + 4t)u के लिए त्रुटि श्रृंखला का उपयोग करके स्थिर ���्थिति त्रुटि निर्धारित करें।
यूनिटी फीडबैक नियंत्रण प्रणाली का ओपन लूप ट्रांसफर फंक्शन निम्नलिखित द्वारा दिया गया है
G(s) = Ks(1+sT1)(1+sT2)
राउथ हरविट्ज़ मानदंड को लागू करते हुए, सिस्टम को स्थिर रखने के लिए T1 और T2 की शर्तों में K का मान निर्धारित करें।
ध्रुवीय एवं व्युत्क्रम ध्रुवीय आलेखों से आप क्या समझते हैं? वे बोड प्लॉट से किस प्रकार भिन्न हैं?
ओपन लूप ट्रांसफर फंक्शन के साथ एक यूनिटी फीडबैक नियंत्रण प्रणाली निम्नलिखित है
G(s) = 50(s+60)(s+2)(s+10)
बोड प्लॉट बनाएं और गेन क्रॉसओवर आवृत्ति, चरण क्रॉसओवर आवृत्ति, लाभ मार्जिन और साथ ही चरण मार्जिन ढूँढ��ें।
निम्नलिखित ओपन लूप नियंत्रण प्रणाली के लिए नाइक्विस्ट मानदंड द्वारा स्थिरता का पता लगाएं।
G(s)H(s) = (4s+1)s2(1+s)(1+2s)
कंपेंसेशन क्��ा है? फेज़ लीड नेटवर्क बनाएए और फेज़ लीड कंपेंसेशन समझाइए।
निम्नलिखित के लिए एक क्षतिपूर्ति नेटवर्क डिजाइन करें।
G(s) = Ks(1+0.2s)(1+0.01s)
ताकि इ��का चरण मार्जिन कम से कम 40° हो और स्थिर अवस्था त्रुटि अंतिम वेग के 2% से अधिक न हो।
स्थानांतरण फंक्शन अपघटन से आपका क्या तात्पर्य है और प्रत्यक्ष अपघटन के बारे में चर्चा करें।
एक रेखिक समय अपरिवर्तनीय प्रणाली का स्टेट समीकरण नीचे दिया गया है
[˙x1] [˙x2] = [-2 0] [1 -1] [x1] [x2] + [0] [1] u(t); t>0
सिस्टम की नियंत्रणीयता ज्ञात करें ��र स्टेट संक्रमण मैट्रिक्स की गणना करें।
किन्हीं दो पर संक्षिप्त टिप्पणी लिखें।
- Linearization effect of feedback
- Effect of location of poles on stability
- Log magnitude versus phase plot
- State space representation of system