Save as PDF
Opens your browser print dialog — select "Save as PDF" to download.
EC-404 (GS)
B.Tech.IV Semester
Examination, June 2024
Grading System (GS)
Control System
Note:
i) Attempt any five questions.
किन्हीं पांच प्रश्नों को हल कीजिए।
ii) All questions carry equal marks.
सभी प्रश्नों के समान अंक हैं।
iii) In case of any doubt or dispute the English version question should be treated as final.
किसी भी प्रकार के संदेह अथवा विवाद की स्थिति में अंग्रेजी भाषा के प्रश्न को अंतिम माना जावेगा।
a) What is control system? Briefly explain the classification of control system.
नियंत्रण प्रणाली क्या है? नियंत्रण प्रणाली के वर्गीकरण को संक्षेप में समझाइये।
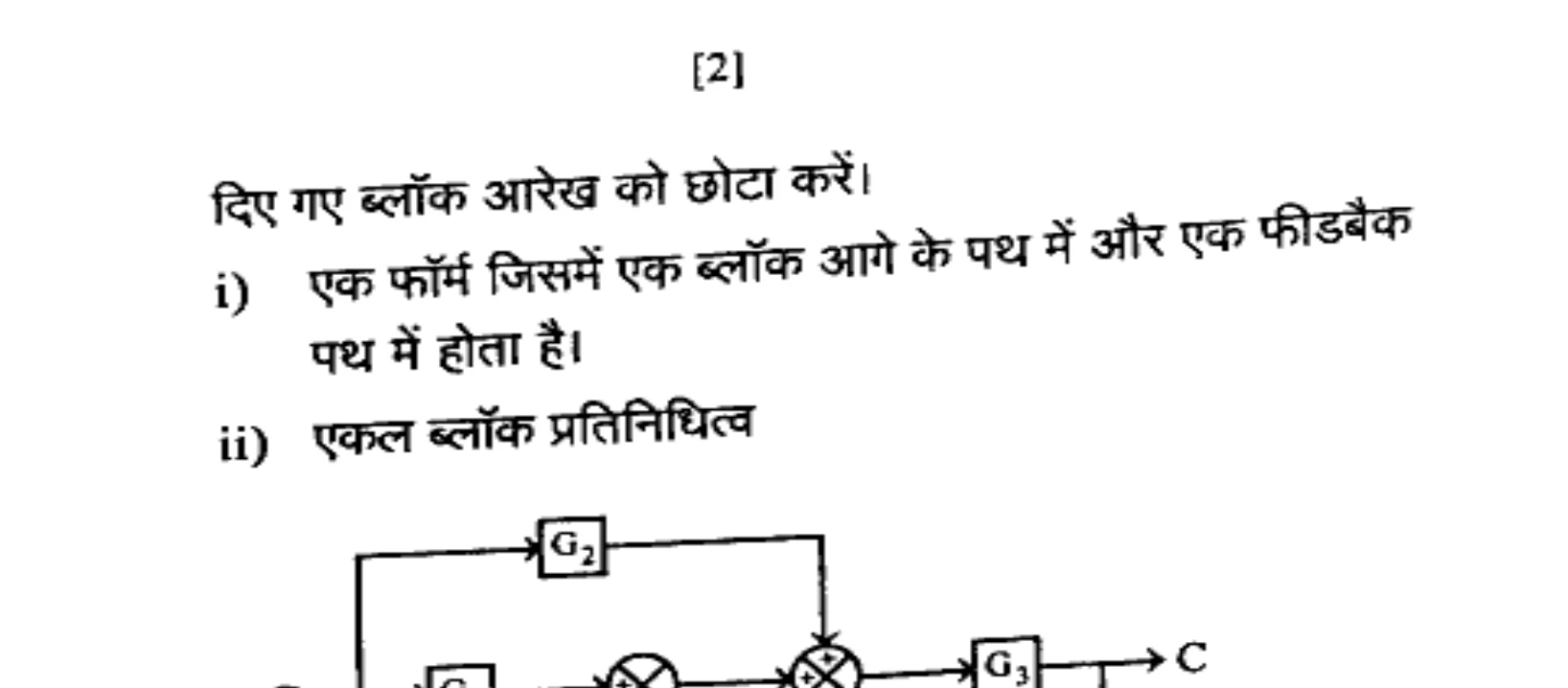
b) Reduce the given block diagram into
दिए गए ब्लॉक आरेख को छोटा करें।
i) A form having one block in the forward path and one in the feedback path
i) एक फॉर्म जिसमें एक ब्लॉक आगे के पथ में और एक फीडबैक पथ में होता है।
ii) Single block representation
ii) एकल ब्लॉक प्रतिनिधित्व
a) For the system with negative feedback, discuss the effect of feedback on the following
नकारात्मक फीडबैक वाले सिस्टम के लिए, निम्नलिखित पर फीडबैक के प्रभाव पर चर्चा करें।
i) Disturbance
i) अशांति
ii) System parameter variation
ii) सिस्टम पैरामीटर भिन्नता
iii) System time constant
iii) सिस्टम समय स्थिरांक
Obtain mathematical expression in each case
प्रत्येक मामले में गणितीय अभिव्यक्ति प्राप्त करें।
b) Discuss about the effect of addition of poles and zeros to open loop and close loop system.
ओपन लूप और क्लोज लूप सिस्टम में ध्रुवों और शून्यों को जोड़ने के प्रभाव के बारे में चर्चा करें।
a) Determine the stability of a system having following characteristics equation using Routh Hurwitz criterion
S5 + S4 + 2S3 + 2S2 + 1IS + 10 = 0
राउथ हर्वित्ज़ मानदंड का उपयोग करके निम्नलिखित विशेषता समीकरण वाले सिस्टम की स्थिरता निर्धारित करें।
S5 + S4 + 2S3 + 2S2 + 1IS + 10 = 0
b) Sketch the root locus of the system whose open loop transfer function is
G(s) = K
—
s(s+2)(s+4)
निम्नलिखित ओपन लूप नियंत्रण प्रणाली के लिए बोड प्लॉट को स्केच करें
Find the value of K so that the damping ratio of the closed loop system is 0.5.
उस सिस्टम के रूट लोकस को स्केच करें जिसका ओपन लूप ट्रांसफ��� फंक्शन निम्नलिखित है
G(s) = K
—
s(s+2)(s+4)
K का मान ज्ञात कीजिए ताकि बंद लूप सिस्टम का अवमंदन अनुपात 0.5 हो।
a) Derive the expressing for resonant peak and resonant frequency. Establish correlation between time and frequency response parameters.
गुंजयमान शिखर और गुंजयमान आवृत्ति के लिए अभिव्यक्ति प्राप्त करें। समय और आवृत्ति प्र���िक्रिया मापदंडों के बीच सहसंबंध स्थापित करें।
b) Sketch the bode plot for the following open loop control system.
G(S) = K(1+0.2 S)
—
S2(1+0.001 S)(1+0.005 S)
निम्नलिखित ओपन लूप नियंत्रण प्रणाली के लिए बोड प्लॉट को स्केच करें
G(S) = K(1+0.2 S)
—
S2(1+0.001 S)(1+0.005 S)
a) Using Nyquist criterion investigate the closed loop stability of the system whose open loop transfer function is
G(S)H(S) = K(S+1)
—
(s+0.5)(s-2)
Consider K = 1.25
नाइक्विस्ट मानदंड का उपयोग करके उस सिस्टम की बंद लूप स्थिरता की जाँच करें जिसका खुला लूप ट्रांसफर फंक्शन है
G(S)H(S) = K(s+1)
—
(s+0.5)(s-2)
K = 1.25 पर विचार करें।
b) Draw the diagram of lead compensator and find the expression for its transfer function.
लीड कंपेंसेटर का आरेख बनाइए और इसके स्थानांतरण फंक्शन के लिए अभिव्यक्ति ढूँढ़ें।
a) A unity feedback control system has an open loop transfer function of G(s) = 1/s². Design a suitable compensating network such that a phase margin of 45° is achieved without sacrificing system velocity error constant.
एक एकता फीडबैक नियंत्रण प्रणाली में G(s) = 1/s² का एक खुला लूप ट्रांसफर फंक्शन होता है। एक उपयुक्त क्षतिपूर्ति नेटवर्क डिज़ाइन करें ताकि सिस्टम वेग त्रुटि स्थिरांक का त्याग किए बिना 45° का चरण मार्जिन प्राप्त किया जा सके।
b) Explain in brief propositional, derivative, integral and composite controllers.
प्रस्तावात्मक, व्युत्पन्न, अभिन्न और मिश्रित नियंत्रकों को संक्षेप में समझाइए��
a) Discuss the concept of controllability and observability with suitable example.
उपयुक्त उदाहरण के साथ नियंत्रणीयता और अवलोकननीयता की अवधारणा पर चर्चा करें।
b) The transfer function of a system is given by
Y(s)/U(s) = S2 + 3S + 2
—
S3 + 9S2 + 26S + 24
एक सिस्टम का ट्रांसफर फंक्शन निम्नलिखित द्वारा दिया गया है
Determine the state model by using direct decomposition method.
Y(S)/U(S) = S2 + 3S + 2
—
S3 + 9S2 + 26S + 24
प्रत्यक्ष अपघटन विधि का उपयोग करके स्टेट मॉडल निर्धारित करें।
Write a short note on any two
किन्ही दो पर संक्षिप���त टिप्पणी लिखें।
a) Open loop and close loop systems
अ) ओपन लूप और क्लोज लूप सिस्टम
b) Effect of location of poles on stability
ब) स्थिरता पर ध्रुवों की स्थिति का प्रभाव
c) Log magnitude versus phase plot
स) लॉग परिमाण बनाम चरण प्लॉट
d) State space representation of system
द) सिस्टम का स्टेट स्थान प्रतिनिधित्व
******